- 數字報

- 小程序

- 公眾號

近日,西湖大學智能無人系統實驗室的一項科研成果在全球首次攻克了兩架無人機近距離疊飛的難題。并且,上面的飛機還能伸出操作手,抓取下面飛機搭載的工具,抓取的操作精度達到亞厘米。這也是中國的多旋翼無人機相關技術第一次登上科學期刊《自然》雜志,這兩架疊著飛的無人機有何創新亮點,無人機和具身智能的結合又為我們打開了哪些想象空間?戳視頻↓走進西湖大學實驗室一探究竟。
上下疊飛的無人機 如何實現精準控制?
兩架無人機其實就是兩個空中機器人,要在空中規避強烈的氣流干擾、實現這樣的協同工作,著實不是一件容易的事,研發團隊花了三年時間,要破解兩個主要難題,第一是兩架無人機靠近的時候如何飛得穩,第二是操作手無人機如何拿得穩。剛開始的時候,為了實現疊飛,團隊頻頻經歷了“炸機”的情況。
·氣流補償算法讓無人機保持平衡 飛得穩
先來說飛得穩,關鍵是氣流補償算法,相當于給無人機裝了“風感預警系統”。團隊把空氣動力學原理和實測數據融合成模型,提前植入工具箱無人機的大腦。它能實時測算上方氣流的干擾強度,再通過調整6個旋翼的轉速抵消影響——就像騎手在強風中微調車把,始終保持平衡。
·柔性電磁對接 讓無人機穩穩吸住工具
再來說柔性電磁對接,它堪稱無人機的“智能磁吸手”。工具箱無人機頂部裝著四個帶電磁鐵的圓錐裝置,就像迷你蹦床般用彈性系繩固定。當操作無人機發出信號,電磁鐵立刻通電,哪怕對接時稍有偏移,彈性結構也能自動校準,穩穩吸住工具。實驗中,這個“磁吸手”連細小的剪刀都能精準抓取,幾乎從不會失手。
西湖大學光電研究院副研究員 曹華姿:一個是鐵片,一個是電磁鐵,要貼合上才能吸起來,對我們的精度,對我們裝置的設計就有要求。有了柔順性裝置之后,它通過柔順性自己就可以貼合起來。
·通過識別專屬二維碼 算出兩者相對位置
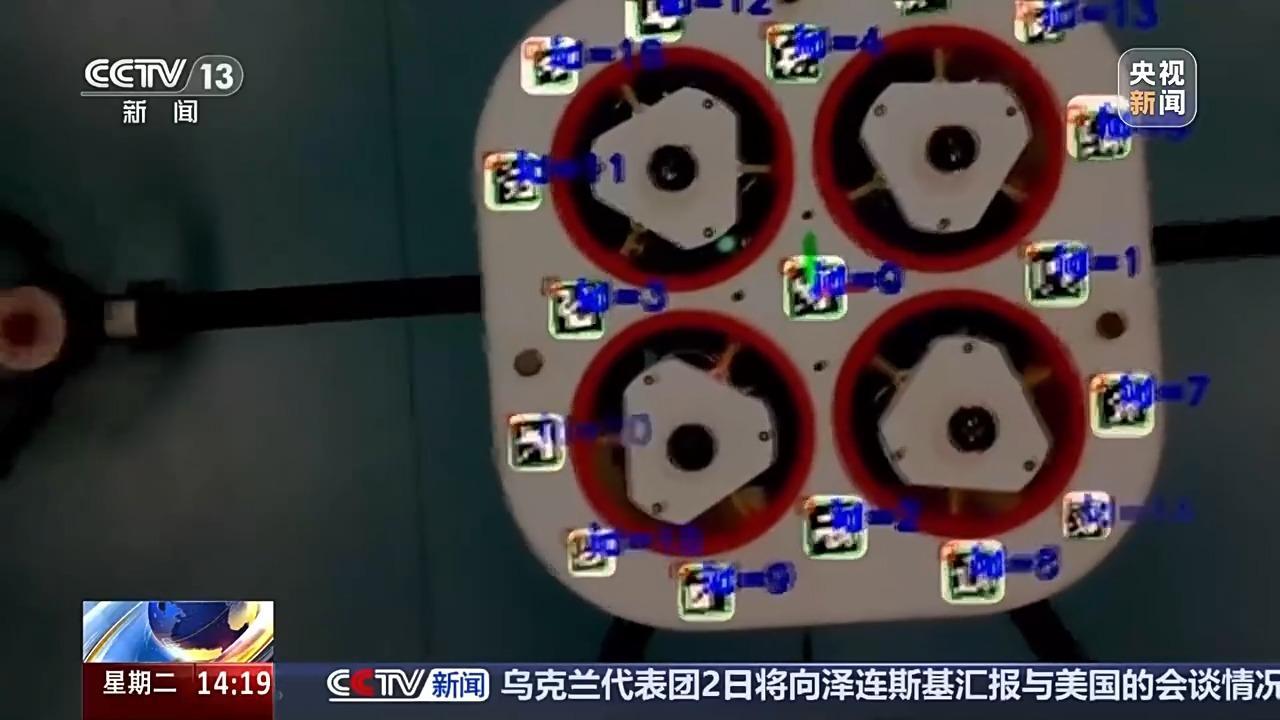
工具箱頂部貼著十多個專屬二維碼,操作無人機的相機只要識別到足夠數量的二維碼,就能瞬間算出兩者的相對位置。這套“視覺+調速”的組合拳,把對接誤差壓縮到了0.8厘米,比此前的技術精度提升了近10倍。
西湖大學智能無人系統實驗室負責人 趙世鈺:因為我們無人機加上機械臂其實是新型的,非常有潛力的一種機器人的類型。我們更需要無人機有更親密的合作,特別是載荷的交換,比如說從一個無人機上把工具拿起來,或者把工具給放回去,這種工具的交換其實是非常關鍵的。
無人機可在生活中帶來更多應用場景
不光是兩架無人機可以協同工作,再看看下面這些無人機的“花活兒”,能實現這些高難度的動作,其實意味著,它能在我們的生活中帶來更多的應用場景。


西湖大學智能無人系統實驗室博士生 季夢玉:機械臂對無人機有一個干擾,這樣就會讓它的無人機的位置和姿態有劇烈變化,反過來它對機械臂也有干擾,所以兩個之間有強烈的耦合關系,這個力還是很大的。比如說我在森林防火或者扔急救包的時候,我可能需要比較大的初速度給它扔下去,扔到一個位置,或者是我在空中摘果實,把果實扔到對應的籃子里邊。

·無人機可在生活中帶來更多應用場景
得益于抗沖擊算法,即便物品放偏了放歪了,這個小飛板也能很好地保持姿態和重心。你可能很難想象,一個小小的無人機,能夠幫助我們干這么多事兒,而它們也只是一些簡單的示范。想象一下,有一天能夠保持平衡穩定的飛毯,能夠在危險發生的時候保護人不受傷害,并且能懸停在空中,隨時對受困人員進行營救,是不是有一種科幻大片的即視感。
大模型控制 無人車集群智能默契十足
看似“花拳繡腿”的背后,給未來無人機空中智能的進化帶來了更多的想象空間。不僅如此,在大模型的控制下,多臺無人設備還能夠自主決策,涌現出集群智能的特點。
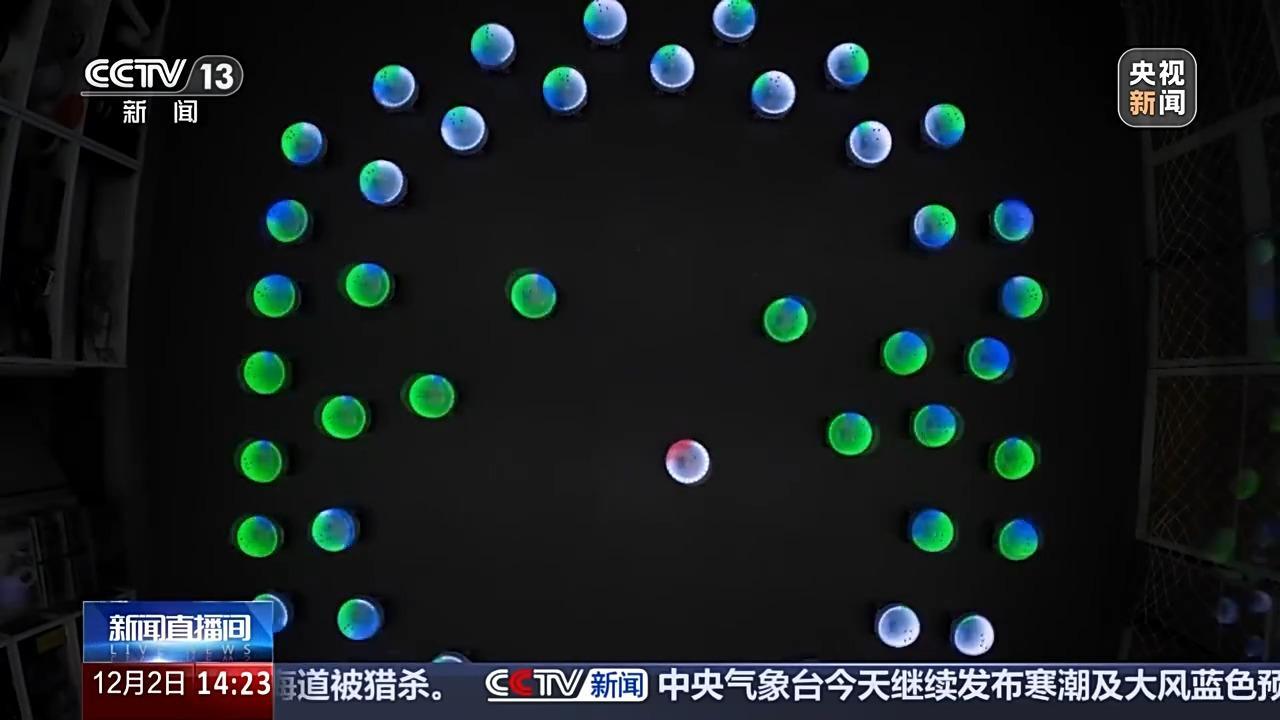
注意看,這些成群的無人設備,正在通過大模型控制,自主地完成編隊等任務。如果其中一個無人設備掉隊,或者出現問題,其他的會自動補齊。這些都是靠AI自主控制完成的。
西湖大學智能無人系統實驗室負責人 趙世鈺:我們的愿景是實現通用集群智能,這些機器人就能夠自動地去幫我們做非常復雜的任務,能夠實現這種人通過自然語言能夠自然交互,并且在出現一些新的情況、新的任務的時候,整個系統能夠絲滑地去進行切換,而不需要像之前那樣非常僵硬的重新編程等。

這種分布式的集群智能,沒有指揮中心,幾十臺、上百臺無人機,靠“對話”和“感知”,就能像魚群、鳥群、蟻群一樣,自主通信、自主決策,協同完成復雜任務,涌現出高層的智能行為。
友情鏈接: 政府 高新園區合作媒體
Copyright 1999-2025 中國高新網chinahightech.com All Rights Reserved.京ICP備14033264號-5
電信與信息服務業務經營許可證060344號主辦單位:《中國高新技術產業導報》社有限責任公司
