- 數(shù)字報

- 小程序

- 公眾號

美國卡內(nèi)基·梅隆大學(xué)科學(xué)家開發(fā)出一種新型3D打印工藝,成功制造出名為microDeltas的微型德爾塔機器人。這些機器人有望在微操作、微組裝、微創(chuàng)手術(shù)以及可穿戴觸覺設(shè)備等領(lǐng)域發(fā)揮重要作用。相關(guān)論文發(fā)表于新一期《科學(xué)·機器人》雜志。
德爾塔機器人,又稱平行機器人或平行四邊形機器人,是一種高速輕載的并聯(lián)機器人。它由三條平行支撐桿構(gòu)成機械臂,采用平行四邊形結(jié)構(gòu),廣泛應(yīng)用于食品包裝、藥品分揀、電子裝配和新能源車壓鑄加工等領(lǐng)域。
早在20世紀80年代微機電系統(tǒng)問世時,工程師們就曾設(shè)想將其用于制造微型機器人。物理縮放定律也預(yù)示,小型化機器人有望在速度與精度等方面實現(xiàn)突破。然而,受限于當時的微型3D制造技術(shù),將機器人縮小到微觀尺寸并非易事。
此次,團隊開發(fā)出一種基于雙光子聚合的3D打印工藝。這是一種先進的納米制造技術(shù),通過聚焦激光精準固化感光材料,再沉積一層薄金屬,即可制造出具備電氣功能的復(fù)雜3D結(jié)構(gòu)與致動器,無需手工折疊或組裝。
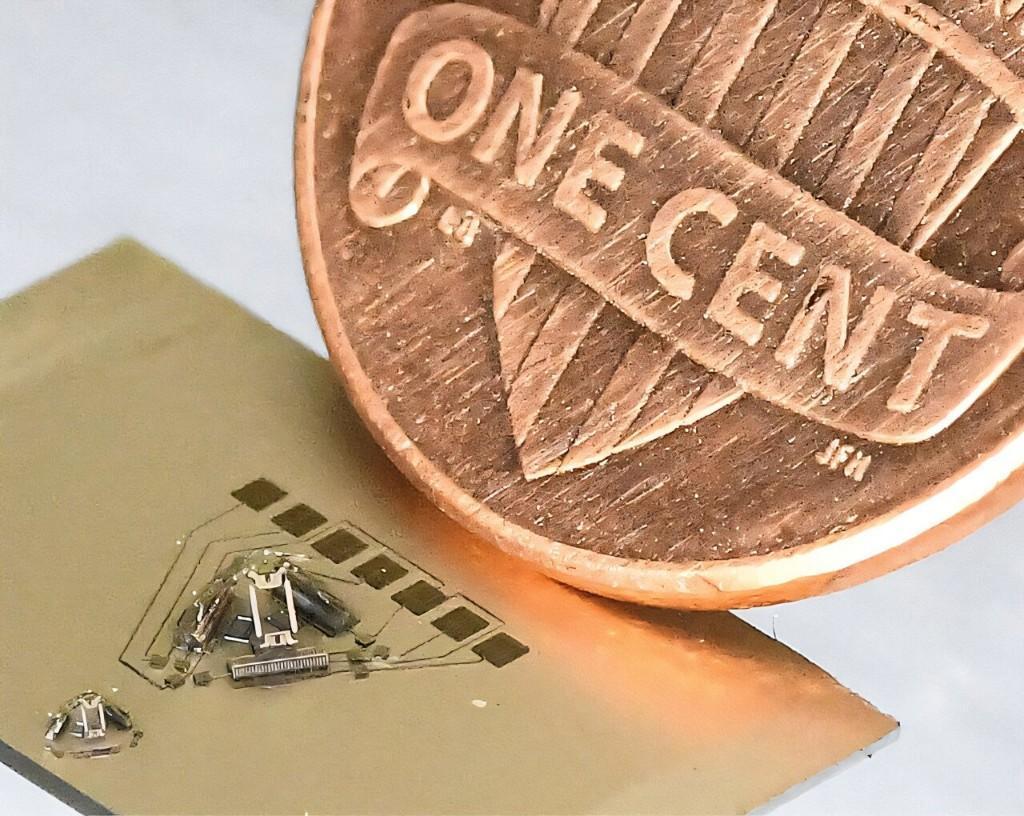
利用該技術(shù),團隊制造出高度僅為1.4毫米和0.7毫米的微型德爾塔機器人。與同類機器人比較,它們是迄今體型最小、速度最快的。實驗證實,縮小尺寸不僅將機器人的精度提升至亞微米級,還使其工作頻率超過1千赫茲,甚至能發(fā)射相當于自身質(zhì)量7.4%的鹽粒。
團隊表示,借助3D設(shè)計與打印技術(shù),他們僅用很短時間就完成了八次機器人設(shè)計迭代,而傳統(tǒng)方法可能需要數(shù)周甚至數(shù)月。未來,通過調(diào)整設(shè)計參數(shù)、構(gòu)建大規(guī)模陣列或引入傳感反饋,還能進一步提升機器人的帶寬、精度與工作范圍。
友情鏈接: 政府 高新園區(qū)合作媒體
Copyright 1999-2025 中國高新網(wǎng)chinahightech.com All Rights Reserved.京ICP備14033264號-5
電信與信息服務(wù)業(yè)務(wù)經(jīng)營許可證060344號主辦單位:《中國高新技術(shù)產(chǎn)業(yè)導(dǎo)報》社有限責(zé)任公司
